Environment-Aware Adaptive Cruise Control for Assistive Wheelchair
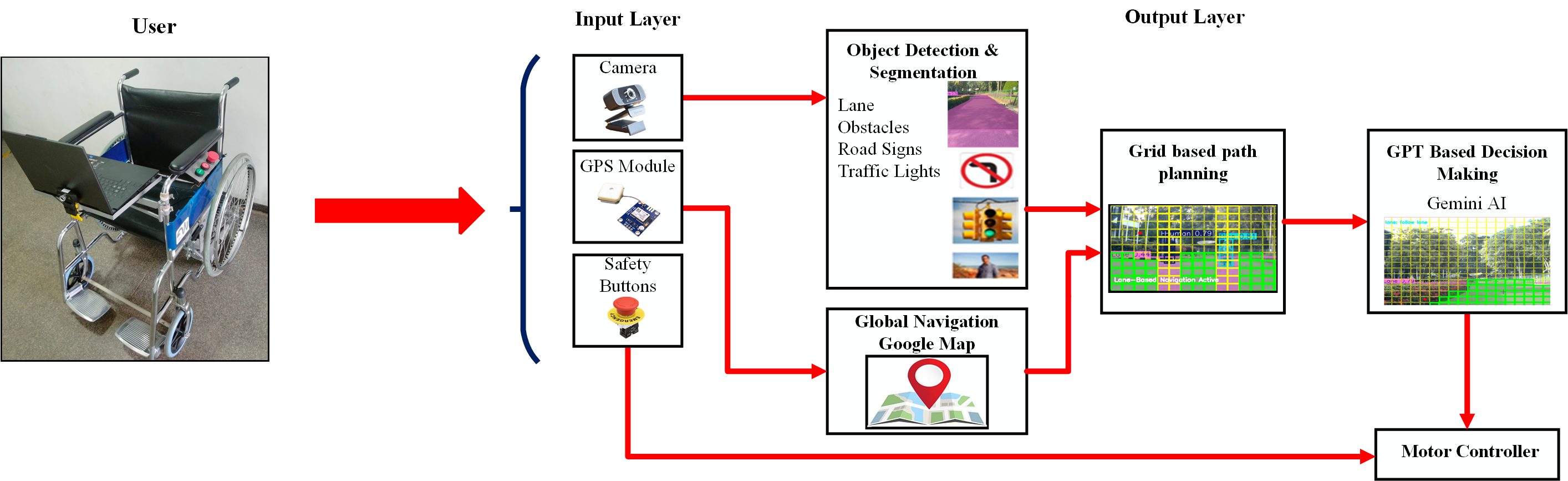
This research focuses on developing an Environment-Aware Adaptive Cruise Control (EA-ACC) system for assistive wheelchairs, aiming to enhance mobility, safety, and independence for individuals with limited mobility. Unlike traditional vehicle-based systems, EA-ACC integrates environmental awareness to navigate complex indoor and crowded environments. Using sensors like LiDAR and cameras, it detects and responds to dynamic obstacles with real-time speed and direction adjustments. Driven by AI and machine learning, the system continuously adapts to user needs and environments, offering a user-centered design with override and sensitivity controls for a safer and more practical mobility solution.

Wheelchair

WheelChair

Implementation
Research Students

Esana Kaumadi

Chathurika Hasanthi
×
![]()