Human-Like Intention Generation Based on Visual Perception of Humanoid Robots

This research is for a method to enhance robot intelligence for environment identification using visual perception. We explore five environments: electronics lab, mechatronics lab, lecture halls, roads, and playgrounds, using Computer Vision for object detection to identify 43 distinct objects. An AI model was trained for improved accuracy in live feeds, and a Python script was developed to count objects in each environment, creating a dataset based on object occurrences. This dataset was used to train a model capable of identifying environments by object counts. Our approach demonstrates the integration of object detection and neural networks for intelligent environment identification, enhancing robotic autonomy in varied settings.
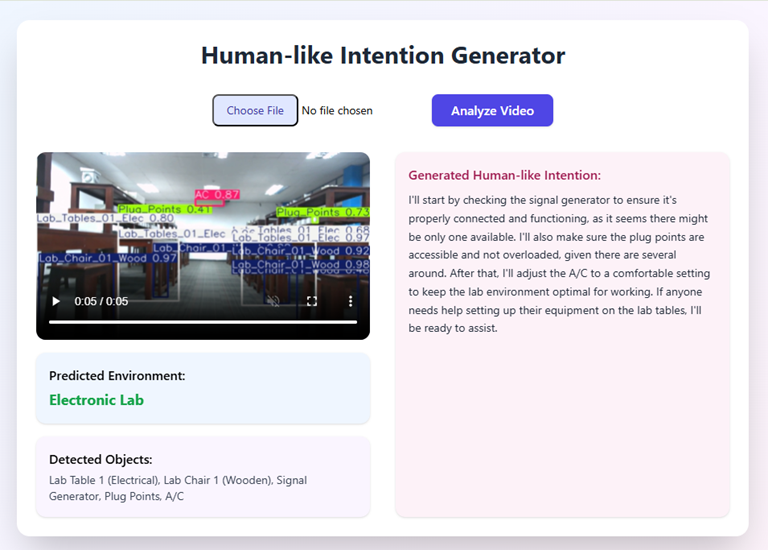
Visual Perception System
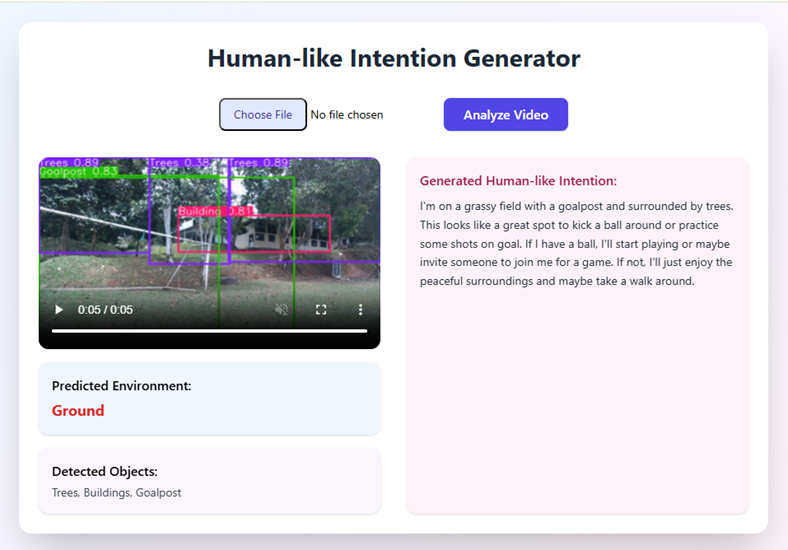
Environment Detection
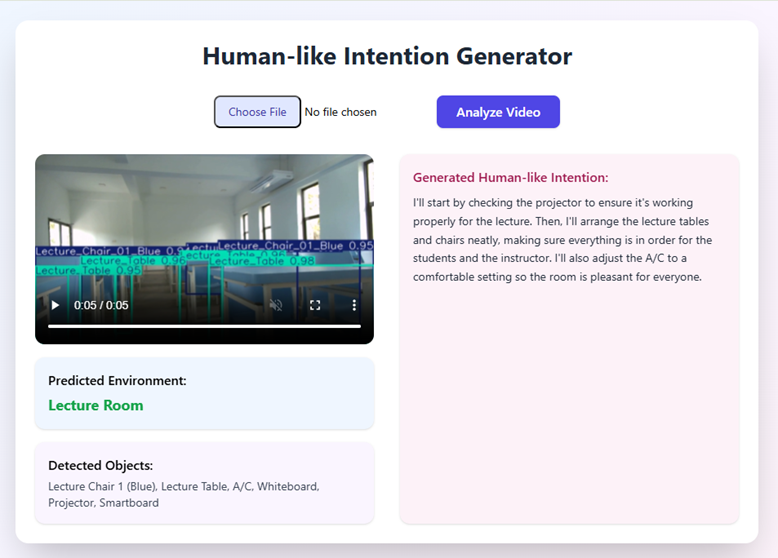
Object Recognition
Research Students

Shakil Arifeen

Ometh Perera
×
![]()