Vision-based Assistance Robot in Laboratory Environment
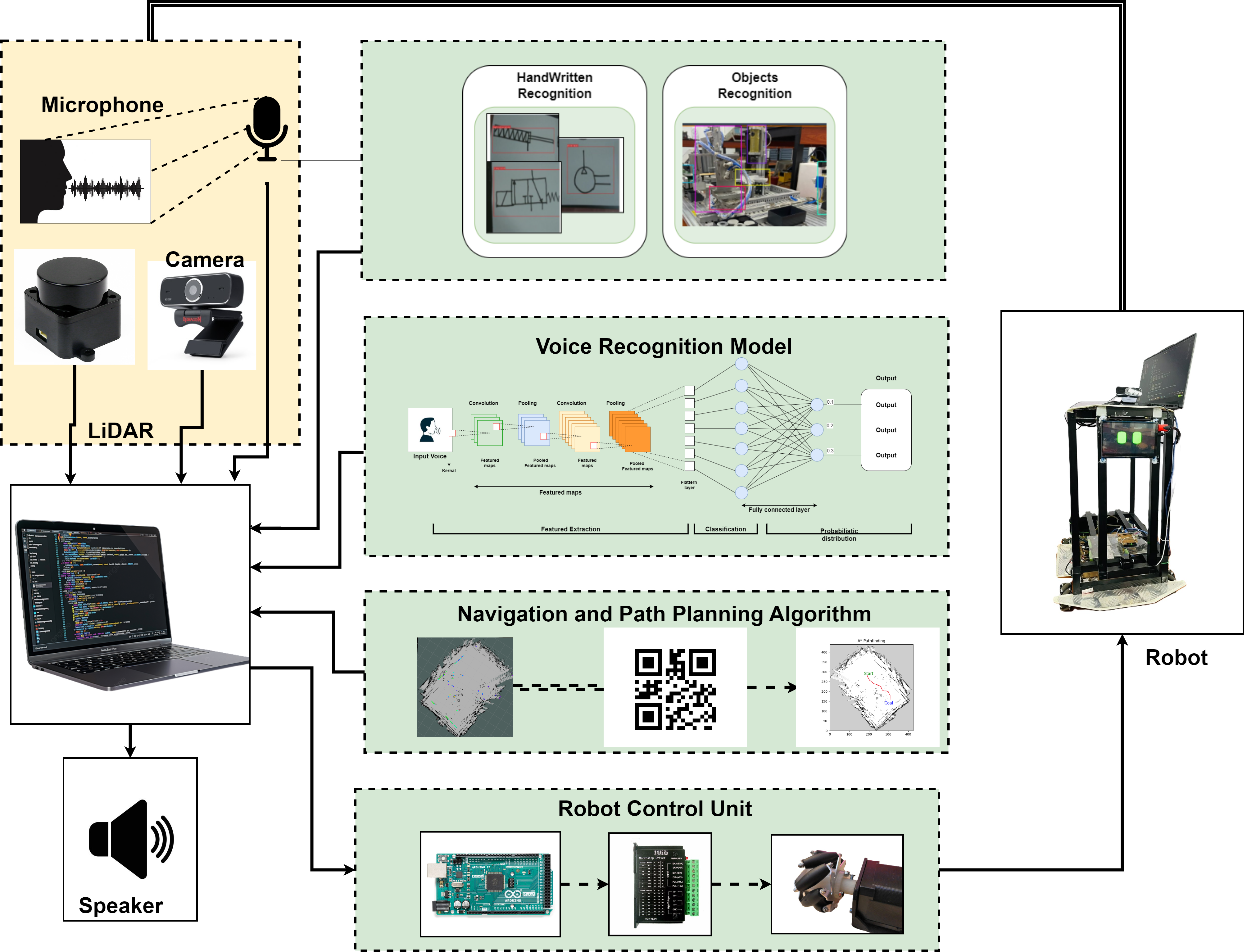
This study introduced a teaching assistant robot designed to enhance laboratory education in Mechatronics through increased student participation and teacher support. The robot incorporates advanced technologies such as real-time navigation, sensor and actuator detection, voice command recognition, pneumatic symbol identification, facial authentication, voice response, and environmental awareness. Its omnidirectional mobility, enabled by Mecanum wheels, allows for smooth movement, while SLAM algorithms and LiDAR mapping support effective obstacle avoidance and path planning. The robot uses ROS2 for seamless navigation in complex environments and integrates Computer Vision models for intuitive interaction. Future developments aim to enhance indoor navigation, robot localization, environmental awareness, and adaptive cruise control.
System Components

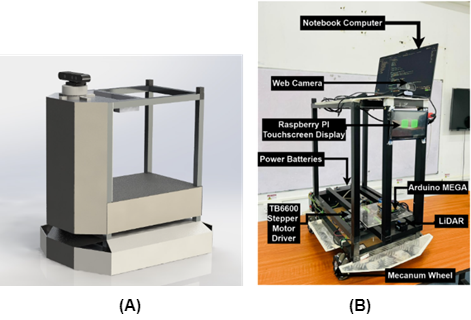
Robot Implementation
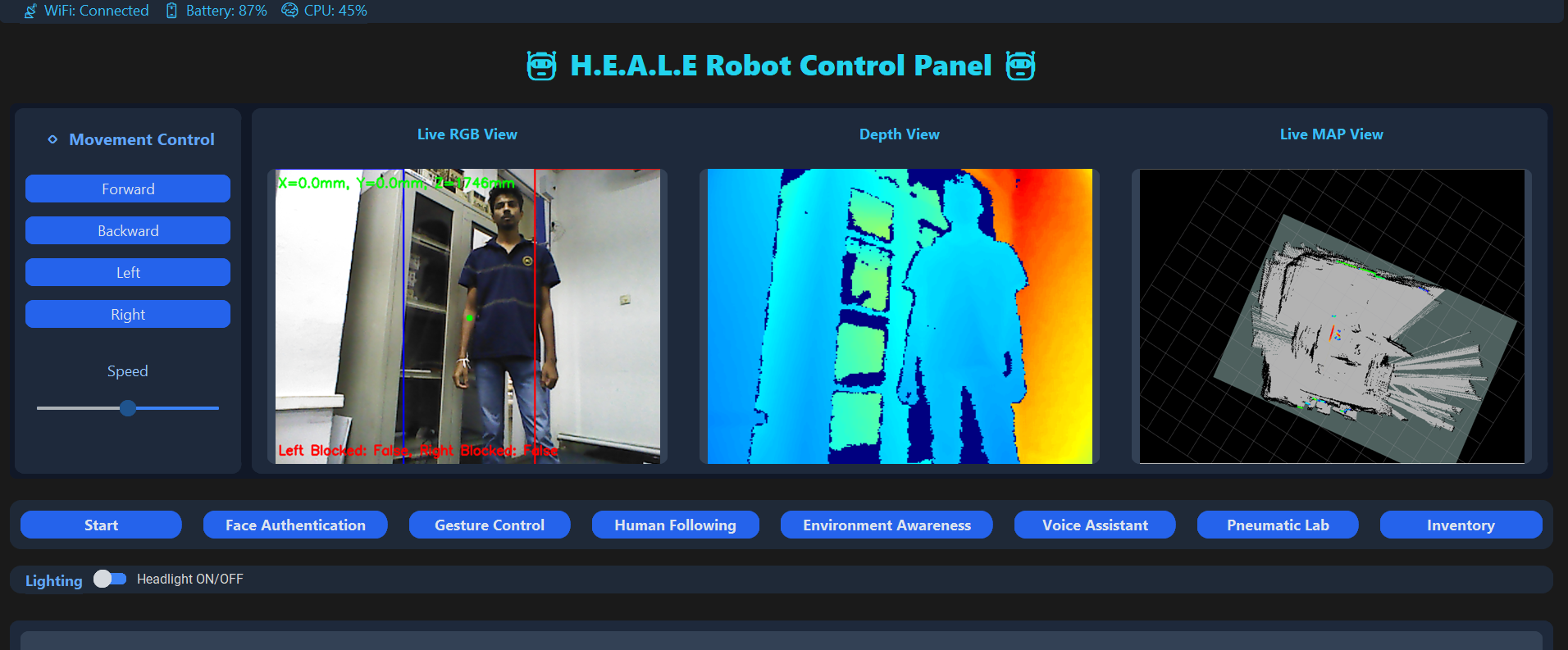
Robot Control Panel
Research Students

Ashini Rupasinghe
