
Development of Multimodal Assessment of Parkinson’s Disease
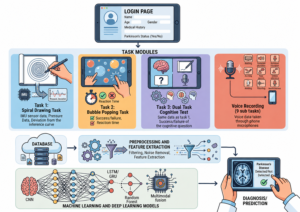
Development of Multimodal Assessment of Parkinson’s Disease Development of Multimodal Assessment of Parkinson’s Disease This research develops a multilingual tablet-based
Digital Facial Biomarkers for Age Related Health Condition Detection Parkinson Disease
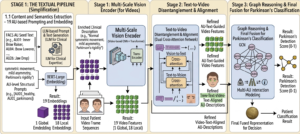
Digital Facial Biomarkers for Age Related Health Condition Detection Parkinson Disease Digital Facial Biomarkers for Age Related Health Condition Detection
Brain-Computer Interface Approach for Mobile Robot Navigation
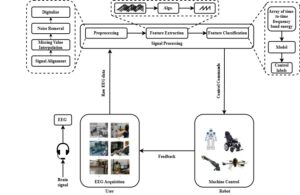
The fusion of neuroscience, robotics, and artificial intelligence through our innovative project leverages Brain-Computer Interface (BCI) technology to revolutionize human-robot interaction. Enabling direct brain-to-robot communication, this initiative transcends conventional controls, creating a seamless interface for effortless collaboration, advancing assistive technologies, and enhancing user experiences.
Visual Inspection Hybrid System for Vitamin-D Deficiency
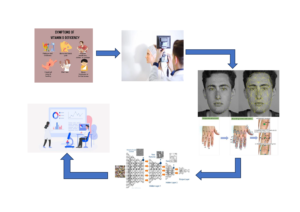
Vitamin D is vital for health, but deficiencies are widespread due to poor diets, declining soil nutrients, and limited access to traditional diagnostics. Blood tests, though accurate, are invasive and costly, especially in low-resource areas. This project introduces a non-invasive, machine learning-based system to detect vitamin deficiencies via images of skin, hair, and nails, enhancing accessibility and supporting telemedicine.
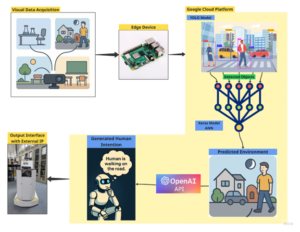
Human-Like Intention Generation Based on Visual Perception of Humanoid Robots
This research is for a method to enhance robot intelligence for environment identification using visual perception. We explore five environments: electronics lab, mechatronics lab, lecture halls, roads, and playgrounds, using Computer Vision for object detection to identify 43 distinct objects. An AI model was trained for improved accuracy in live feeds, and a Python script was developed to count objects in each environment, creating a dataset based on object occurrences. This dataset was used to train a model capable of identifying environments by object counts. Our approach demonstrates the integration of object detection and neural networks for intelligent environment identification, enhancing robotic autonomy in varied settings.

Environment-Aware Adaptive Cruise Control for Assistive Wheelchair
This research focuses on developing an Environment-Aware Adaptive Cruise Control (EA-ACC) system for assistive wheelchairs, aiming to enhance mobility, safety, and independence for individuals with limited mobility. Unlike traditional vehicle-based systems, EA-ACC integrates environmental awareness to navigate complex indoor and crowded environments. Using sensors like LiDAR and cameras, it detects and responds to dynamic obstacles with real-time speed and direction adjustments. Driven by AI and machine learning, the system continuously adapts to user needs and environments, offering a user-centered design with override and sensitivity controls for a safer and more practical mobility solution.